Brief Project Description:
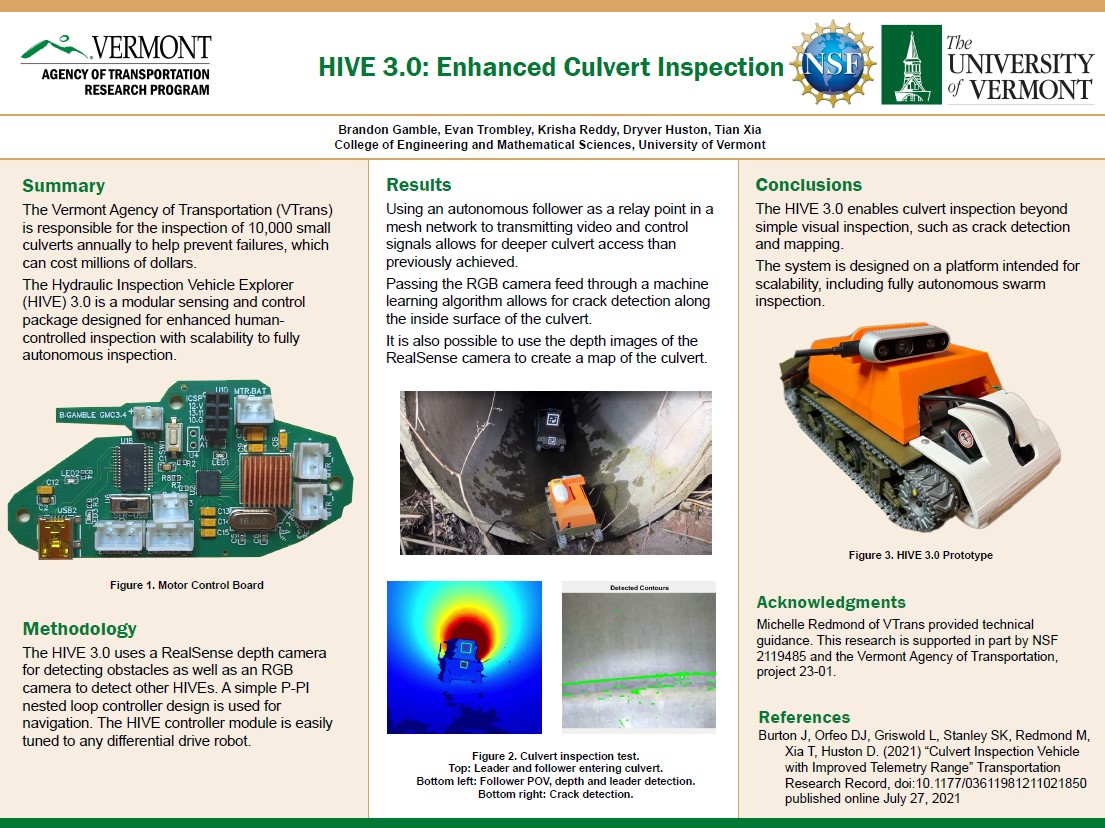
This research examines designing, building and using simple low-cost robots for the inspection of small culverts. The motivation is that the Vermont Agency of Transportation (VTrans) requires all culverts to be inspected every 5 years, resulting in a need for approximately 9,600 small culverts to be inspected annually. Previously research developed low-cost robotic culvert inspection systems, i.e., the HIVE 2.0. This research examines methods of simplifying the construction and maintenance of these robots while improving their performance.
Poster:
Fact Sheet Presentation Slides Presentation Recording
Presenter: Brandon Gamble, UVM and Evan Trombley, UVM
Contact: Evan Trombley, UVM, evan.trombley@uvm.edu; Brandon Gamble, UVM, brandon.gamble@uvm.edu